
This post is first in a series about some of my recent work. It tries to implement a procedure called Barbour-Bertotti best matching principle (explained below) using an approach called Entropic Dynamics (explained in a future post).
Suppose you see three stars in the sky and take a picture of them at a given time. After some time, we have another configuration of these stars and we take another picture of these stars. Now here comes the main point. Since we don’t have a coordinate system at the back of these stars, then how would you know that how much these stars have moved?

This problem is called the problem of equilocality i.e. “how to tell if a particle is at the same position at two different times, without a coordinate system?”. The importance of this problem was realized by Newton and Leibniz. Newton gave the idea of “absolute space” to deal with this problem. This idea says that “space is absolute for all observers” which means that there is a universal coordinate system that is attached to this “absolute space” and it can be used to track the change of the position of a particle. Leibniz disagreed with this position.
A possible solution to this problem was proposed by Julian Barbour and Bruno Bertotti in 1982. They proposed taking the two pictures of the stars shown above and putting one picture over the other one. You can see two possible overlappings of these two pictures below. Now, we try to find an overlapping such that these pictures are “best matched”. This is called the Barbour-Bertotti best matching.
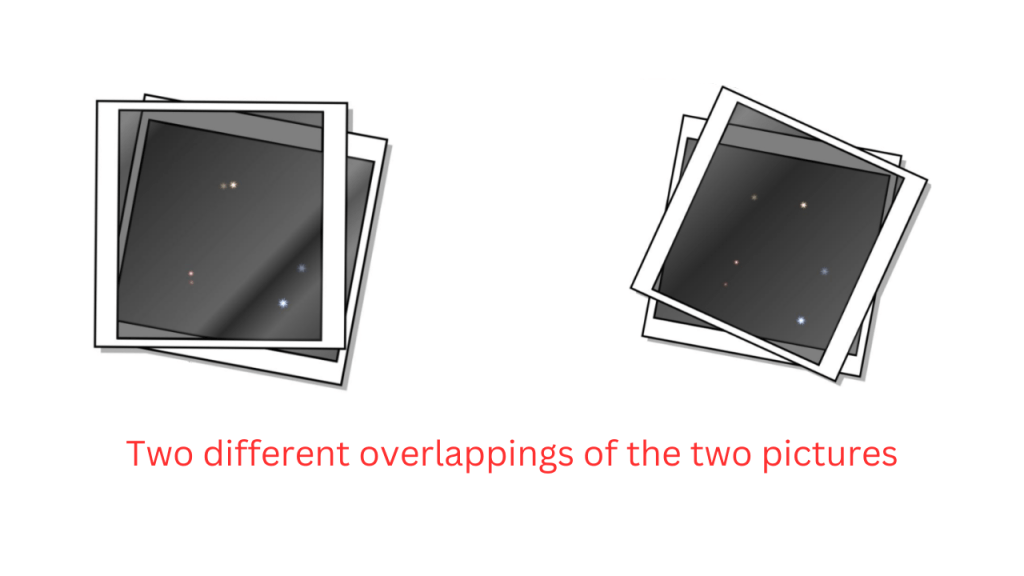
What does “best matched” mean? Suppose that we had some measure of how “different” the two configurations in a certain overlapping are. This measure depends on two things. Firstly, it depends on the intrinsic configurations shown in the pictures and secondly, it depends on the overlapping of one picture over another. By “best matching”, we mean that this measure is minimized i.e. we find an overlapping that minimizes this measure. By finding such an overlapping, we stick to one overlapping and now, this measure is dependent on the intrinsic configurations shown in the pictures themselves.
However, there is a question that needs to be addressed here. Suppose that if we have a given overlapping of one picture over another. How can we change the position of the picture on the top to get another overlapping? The answer to this question depends on the symmetries that one is assuming.
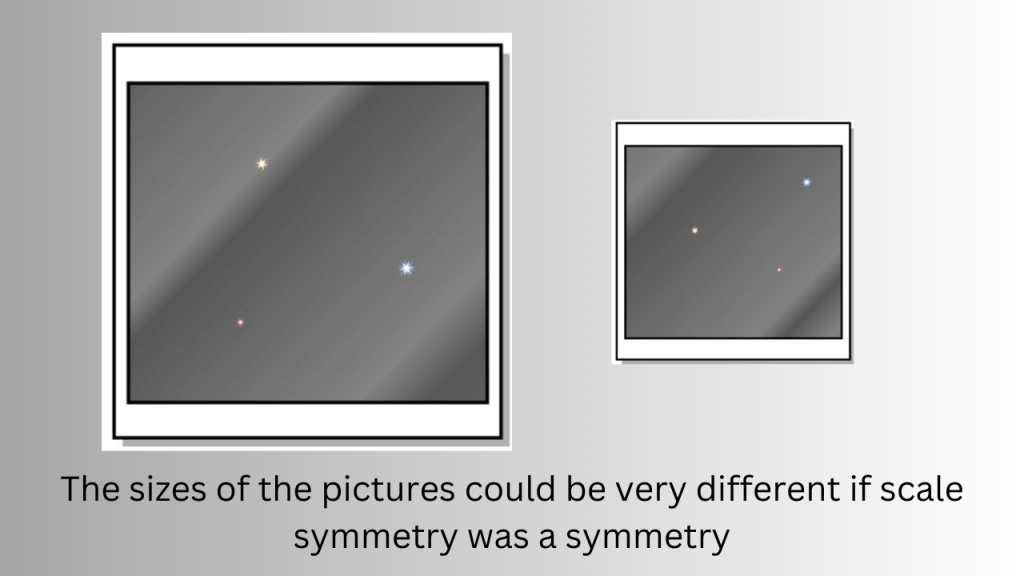
If we think that space has translational and rotational symmetry, then one can move the position of the picture on the top, and one can rotate it. However if someone assumes that space also has scale symmetry (which we haven’t assumed here), then one can also stretch or squeeze the picture on the top to get another overlapping. If this was the case, then the sizes of these two pictures are allowed to be very different (because you can squeeze the bigger picture to “best match” it with the smaller one).
We can think about it in terms of reducdancies in the system. The reasoning goes as follows. Suppose that we have some hypothetical coordinate system. If we have translational symmetry, then we can specify the coordinates of these three stars only upto a constant vector. This is because any set of coordinates for these stars are equivalent to another set of coordinates where a constant translation vector is added to all the previous coordinates.
We can set this constant vector to a particular value by fixing the coordinate of one of these stars. If we do that, then we see that in order to specify the configuration of this three star system, we need the coordinates of the remaining two stars only. Therefore, the coordinates of the third star are “redundant”.
The people who are familiar with gauge symmetry and gauge fixing can smell these concepts here. This kind of reasoning can be done for other kinds of symmetries e.g. rotational symmetry etc. In short, Barbour-Bertotti best matching applies whenever you have redundant degrees of freedom in our theory (which also includes gauge theories).
In a future post, I will describe some of the work that I did in a side project where we tried to implement this best-matching principle using a formalism called Entropic Dynamics.
* Some pictures from F Mercati, “A shape dynamics tutorial” are used to prepare this picture.
